




Human-machine communications
As the demographics of the United State have increasingly shifted towards older Americans, caring for people who are elderly becomes more and more important. Individuals with upper limb impairments also face difficulties to perform activities of daily living. Assistive robotic systems find many applications in the healthcare domain and show great potential. Human-robot interaction is one of the most important research topics and mostly the interaction is through visual and auditory (voice command) channels. However, people who are elderly and people who need healthcare accommodations frequently lose partial or complete visual or auditory capabilities, thus it may be challenging for them to interact with the assistive robot using voice or to locate the robot visually. Therefore, new design of human-robot communication systems is necessary to help people who are elderly or have a disability, especially for people with upper limb limitations, to perform some of the essential activities of daily living and improve the quality of their life.
Tele-operation
While assistive robotic arms increase the accessibility of physical manipulation tasks, they are difficult to tele-operate effectively. Tele-operation is a method to operate a robot, while still being at a distance from it. When controlling an arm with many degrees of freedom using a lower-dimensional input, even simple tasks can become tedious and cognitively burdensome. Thus, health monitoring at home or hospitals with interactive teleoperation is of interest to researchers.
High-dexterity robots in manufacturing
Robotics provides an efficient approach in automation for the manufacturing industry as relevant to both automation of traditional manufacturing processes and advancement of additive manufacturing techniques. In both cases, these goals can be achieved through the integration of high-dexterity robotics for the completion of complex manufacturing assembly operations, especially aiding persons with disabilities with manufacturing tasks in their workplace.
Robotics for workplace assistance
Assistive robots can give people with disabilities vocational opportunities so that they can lead productive lives through their own vocations. Thus, development of a vocational robot system that helps people with disabilities in their vocations has significant meaning. The robotic system will be used to assist a person with a disability in a working environment, such as, working as a librarian with the task of cataloging collections of old books, carrying documents, and serving drinks in an office environment. However, the current research is limited to an office environment and there has been little research dealing with the development of vocational robotic systems that can help people with disabilities in a factory environment. The types of tasks that people with disabilities perform differ from country to country due to regional differences in industrial structures. Further, the factory setting increases the likelihood of dangerous operating environments thus raising the safety requirements for assistive robot design should be well considered.
Real-time image processing
Many individuals with disabilities may require caregiver assistance to perform activities of daily living due to disease or advanced age. Adding a real-time image recognition function to assistive robots may not only solve the daily living problems and enhance the user’s autonomy, but also mitigate the loading of caregivers and reduce necessary caregiving time.
Mobile and wireless control
Robotics research and design span several areas of service, manufacturing to home, entertainment, rehabilitation, search and rescue. There are several operational mobile robot currently used in our research and course work including a 3pi robot, a Boe-Bot, and a Freescale Intelligent Car. These robots were modified and rebuilt so that they meet the intended research at UW-Stout. These low-cost robots are equipped with geared motors, infrared sensors, a 3-axis accelerometer, and analog to digital converters, a magnetometer, a GPS locator, and a camera.
2017 Project Outcomes

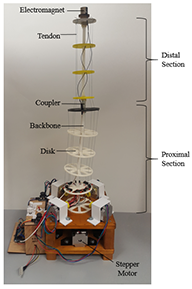
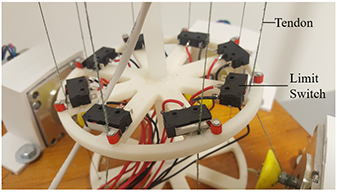
Bendy ARM: A Continuum Manipulator for Assistive Technology
A continuum manipulator was designed and developed as an assistive robot. Two rounds of user testing were performed to evaluate the potential of this arm to complete activities of daily living. The results of this user testing indicate that continuum manipulators warrant further investigation as an alternative to existing commercially available assistive robotic manipulators.
All files and documentation associate with this project can be found here: https://osf.io/ezfkn
2016 Project Outcomes
Autonomous Meal Assistance Robot
One group of our 2016 REU participants successfully developed a semi-autonomous meal assistance robot system that allows people with reduced upper limb functionality to feed themselves using facial expressions to control the robot. The semi-autonomous robot has been developed using a Kinova JACO robot arm and tested with both able-bodied and an individual with an upper limb disability. The robot system has been developed to be portable instead of tethered to a bale and wall power sockets. In addition to this, a library of commands has been created, where different facial features control different movements of the arm. Users consistently expressing their preference for this autonomous meal assistance system over manually controlling the JACO robot for eating. They found mode switching confusing and frustrating using the joystick or other input devices. The robotic meal assistance system developed relieves those switches and simplifies the feeding process. In the future, faculty mentor and REU participants will continue the research work, especially for people who don't have full control of their upper body.

